- ZIMO Home
- ESTWGJ
- Sound Design
- STP & PfuSch
- ZCS
- ZIMO GURU (FAQ)
- Links zu Partner Websites






MN Non-Sound Decoders for small scales (Z bis H0)

 *
*
ZIMO non-sound decoders correspond technologically to MS sound decoders. The identical microcontrollers and largely the same components for the power electronics (motor output stages, etc.) are installed in both product classes, and of course also the software is (further) developed together to a large extent. These similarities result in, among other things, the same driving behaviour, the same mapping, the same (planned) script capabilities and a similar project organisation, whereby there are sound projects for sound decoders on the one hand and projects (without sound) for non-sound decoders on the other, which contain both configuration data (i.e. essentially CV lists) and GUI data.

GENERAL CHARACTERISTICS
Short characteristic of the DECODER FAMILIES:
Click on this symbol to expand the respective table row: the meaning of the data in the table and the properties of the individual decoders are explained by background information and application notes.
If you move the mouse over the pictures of the respective decoder, an info area with further pictures appears for selection.
You can also drag the open field and thus keep it open to compare different decoders.
Pictures & Download: In the abovementioned info area there is also a button to display a full-screen gallery with high-resolution images.
In the upper right corner there is a button that you can use to download the images.
expand all
|
 collapse all
(useful to print out the complete information)
collapse all
(useful to print out the complete information)
MN NON-SOUND DECODERS for small scales (Z to H0) |

MN330..  MN330, -R  MN330, -R top  MN330, -R bottom  MN330P22  MN330P22 top  MN330P22 bottom  |

MN340C/D 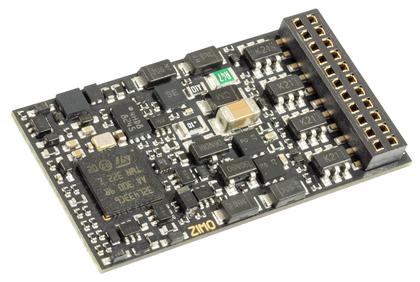 MN340C/D  MN340C/D top  MN340C/D bottom  |
 
MN300..  MN300, -R, -F  MN300, -R, -F top  MN300, -R, -F bottom  MN300P16 
MN300P16 top 
MN300P16 bottom 
|

MN170..  MN170, -R, -F  MN170, -R, -F top 
MN170, -R, -F bottom  MN170N persp.  MN170N top  MN170N bottom  |


MN160..  MN160 
MN160 top 
MN160 bottom 
MN160N 
MN160N top  MN160N bottom persp.  MN160N bottom  MN160L bottom persp.  MN160L bottom  MN160L top  |
MN150  MN150  MN150 top  MN150 bottom  MN150N  MN150N top  MN150N bottom  |

MN180N18  MN180N18  MN180N18 top  MN180N18 bottom  |

MN140E24  MN140E24  MN140E24 top  MN140E24 bottom  |

MN140P12 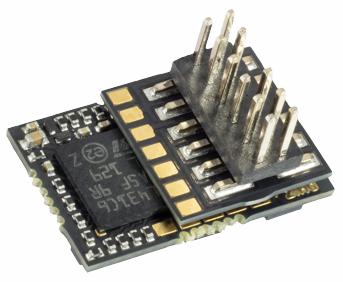 MN140P12  MN140P12 top  MN140P12 bottom  |
MN250 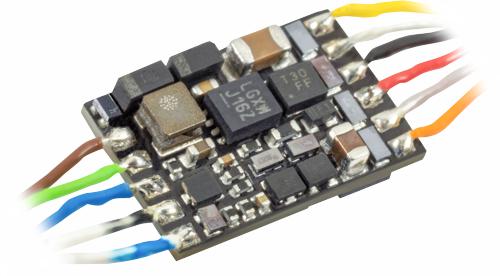 MN250  MN250 top  MN250 bottom  |
|||||||
Standard H0 |
Miniature (N, TT, H0e, H0m, small H0,...) |
Sub Miniature |
Next interface |
E24 interface |
PluX12 (& E24) |
Low Voltage |
|||||||||||
DECODER FAMILIES |
MN330 MN330R |
MN330P22 |
MN340C MTC acc. to VHDM std. |
MN340D MTC variant ZIMO |
MN300 MN300R, MN300F |
MN300P16 |
MN170 MN170R, MN170F |
MN170N |
MN160 |
MN160N, -L |
MN150 |
MN150N |
MN180N18 |
MN140E24 |
MN140P12 |
MN250 |
|
| Permitted operating modes | AC, DC, DCC, MM, mfx | AC (except MN160, MN250 and MN150), DC, DCC, MM, NOT mfx capable | |||||||||||||||
| |
Dimensions (mm) | 30 x 15.3 x 2.2 single-sided assembly! |
30 x 15.3 x 2.2 single-sided assembly! |
28.6 x 15.3 x 2.5 single-sided assembly! |
28.6 x 15.3 x 2.5 single-sided assembly! |
17.6 x 10.5 x 3.1 | 17.6 x 10.5 x 3.1 | 12 x 8.6 x 2.3 | 12 x 8.6 x 2.3 | 13 x 7.5 x 1.6 single-sided assembly! |
13 x 7.5 x 1.6 single-sided assembly! |
8.2 x 5.9 x 2.1 | 8.2 x 5.9 x 2.1 | 13.3 x 9.5 x 2.6 | 13.5 x 8.7 x 2.3 | 13.5 x 8.7 x 2.8 | 9.9 x 7.5 x 2.1 |
| |
Connections | 11 wires NEM-652 |
PluX22 | 21MTCFO3, FO4, FO5, FO6 logic level (std.) |
21MTCFO3, FO4, FO5, FO6 "amplified" outputs |
11 wires NEM-652, NEM-651 |
PluX16 | 9 (resp. 7/6) wires NEM-652, NEM-651 |
NEM-651directly | 7 wires | NEM-651directly | 7 wires | NEM-651directly | Next18 | E24 | PluX12on adapter | 11 wires |
| |
Total current (continuous) motor+FOs(peak) |
1.2 A(2.5 A) | 1.2 A(2.5 A) | 1.2 A(2.5 A) | 1.2 A(2.5 A) | 1.0 A(1.5 A) | 1.0 A(1.5 A) | 0.7 A(1.5 A) | 0.7 A(1.5 A) | 0.5 A(1 A) | 0.5 A(1 A) | 0.5 A(1 A) | 0.5 A(1 A) | 0.7 A(1.5 A) | 0.7 A(1.5 A) | 0.7 A(1.5 A) | 0.5 A(0.8 A) |
| |
Motor current (continuous)(peak) | 1.2 A(2.5 A) | 1.2 A(2.5 A) | 1.2 A(2.5 A) | 1.2 A(2.5 A) | 1.0 A(1.5 A) | 1.0 A(1.5 A) | 0.7 A(1.5 A) | 0.7 A(1.5 A) | 0.5 A(1 A) | 0.5 A(1 A) | 0.5 A(1 A / 5V) | 0.5 A(1 A / 5V) | 0.7 A(1.5 A) | 0.7 A(1.5 A) | 0.7 A(1.5 A) | 0.2 A / 5V(0.3 A / 5V) |
| |
Current on Function OutputsTotal of the FOs | 0.8 A | 0.8 A | 0.8 A | 0.8 A | 0.8 A | 0.8 A | 0.5 A | 0.5 A | 0.5 A | 0.5 A | 0.25 A | 0.25 A | 0.5 A | 0.5 A | 0.5 A | 0.5 A |
| |
number and type of Function Outputs incl. 2 x headlights (+ logic-level outputs) |
104 with wires
(+2 logic level)
(+1 alt. use IN1)6 on s.pads |
109 on plug
(+2 logic level)
(+1 alt. use IN1)1 on s.pad |
4all 4 on plug
(+6 logic level) |
8all 8 on plug
(+2 logic level) |
64 with wires
(+2 logic level)2 on s.pads |
64 on plug
(+2 logic level)2 on s.pad |
6 all 6 on s.pads
(+2 logic level) |
6 2 on plug
(+2 logic level)4 on s.pad |
4 2 with wires
(+2 logic level)2 on s.pads |
4 2 on pins
(+2 logic level)2 on s.pad |
4 2 with wires
or pins 2 on s. pads |
4 2 with wires
or pins 2 on s. pads |
4 all 4 on plug
(+4 logic level) |
8 all 8 on plug
(+4 logic level)2 also on s.pads |
8 4 on plug
(+2 logic level)4 on s.pads |
4 all 4 with wires
|
| |
Servo control wires (complete witch 5 V supply) |
2alternate use
(NO, external 5 V)of logic-level |
2alternate use
(NO, external 5 V)of logic-level |
2alternate use
(NO, external 5 V)of logic-level |
2alternate use
(NO, external 5 V)of logic-level |
2alternate use
(NO, external 5V)of logic-level |
2alternate use
(NO, external 5 V)of logic-level |
2alternate use
(NO, external 5 V)of logic-level |
2alternate use
(NO, external 5 V)of logic-level |
- |
- |
- |
- |
2alternate use
(NO, external 5 V)of logic-level |
2alternate use
(NO, external 5 V)of logic-level |
2alternate use
(NO, external 5 V)of logic-level |
- |
| |
SUSI connection alternatively SUSI, I²C |
yesalternate use
on solder padsof logic-level |
yesalternate use
on PluXof logic-level |
yesalternate use
on MTCof logic-level |
yesalternate use
on MTCof logic-level |
yesalternate use
on solder padsof logic-level |
yesalternate use
on PluXof logic-level |
yesalternate use
on solder padsof logic-level |
yesalternate use
on solder padsof logic-level |
- |
- |
- |
- |
yesalternate use
on Next18of logic-level |
yesalternate use
on E24 plugof logic-level + on s.pads |
yesalternate use
on solder padsof logic-level |
- |
| |
Switch Inputs for cam sensors, Reed switches, i.a |
1on s.pad
+2 alternate useof logic-level |
1on PluX
+2 alternate useof logic-level |
2on MTC
+2 alternate useof logic-level |
2on MTC
+2 alternate useof logic-level |
of logic-level |
of logic-level |
of logic-level |
of logic-level |
- |
- |
- |
- |
of logic-level |
der Logikpegel |
der Logikpegel |
- |
| |
stabilised Low Voltage to be taken from |
- |
- |
5 V
max. 20 mA,on MTC plug |
5 V
max. 20 mA,on MTC plug |
- |
- |
- |
- |
- |
- |
- |
- |
- |
5 V
max 10 mA,on E24 plug |
- |
5 V
max 50 mAon wire |
| |
Energy Storage connection 15 V capacitors DIRECTLY to the decoder |
yes
with wires |
yes
on PluX |
yes
on solder pads |
yes
on solder pads |
yes
on solder padsmax 15,000 µF |
yes
on PluXmax 15,000 µF |
no
|
no
|
no
|
no
|
no
|
no
|
yes
on solder padsmax 15,000 µF |
yes
on plug+ on s.pads max 15,000 µF |
yes
on plug+ on s.pads max 15,000 µF |
yes
on wires2 mini goldcaps incl. |
| Note: The data for decoders under development may still change significantly. All data without guarantee. |
| DOCS and INFO | Connection diagrams can be found in the user manuals and in the decoder info area  |
| User manual | Manual for all MN (and MS) decoders |